5.2. Приведение сил и масс в механизме
Для исследования закона движения механизма его удобно заменить одним условным звеном – звеном приведения, имеющим закон движения аналогичного звена реального механизма.
Все внешние силы, действующие на звенья при этом заменяются одной приведенной силой F∑пр или моментом М∑пр , мощности Р∑пр которых равны мощностям Рi заменяемых сил Fi и моментов сил Mi, т.е.
Р∑пр=∑Рi, где Рi=Fi·Vi·cos(FiVi) или Рi=Мi·ωi;
Р∑пр=F∑пр·V·cos(F∑прV) или Р∑пр=М∑пр·ω.
Здесь Vi и V – скорости точек приложения соответствующих сил; ωi и ω – угловые скорости i-го звена и звена приведения.
Суммарную приведенную силу или момент удобно записывать в виде составляющих, например: М∑пр=∑МFiпр+∑ММiпр, где каждая составляющая определяется из соответствующего равенства мощностей:
МFiпр=Fi·Vi/ω·cos(FiVi) - для силы Fi;
 ММiпр=Мi·ωi/ω - для момента Мi;
ММiпр=Мi·ωi/ω - для момента Мi;
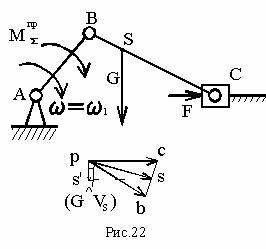
Пример кривошипно-ползунного механизма (рис.22): М∑пр=МFпр+MGпр,
где МFпр=F·VC/ω1=F·lAB·рс/pb;
 MGпр=G·VS/ω1·cos(G^VS)=G·lAB·ps/pb.
MGпр=G·VS/ω1·cos(G^VS)=G·lAB·ps/pb.
Здесь pb, pc, ps|=ps·cos(G^VS) – вектора, взятые с плана скоростей (рис.22).
Как видно из формул, величина Fпр (Мпр) зависит лишь от соотношения скоростей, а не от их абсолютной величины, что позволяет для приведения сил использовать планы скоростей без учета их масштабов. Каждое i-ое звено механизма обладает массой mi и моментом инерции Ji относительно оси, проходящей через центр масс звена, при этом кинетическая энергия i-го звена плоского механизма равна:
Ti=(mi·Vi2/2)+Ji·ωi2/2.
Массы и моменты инерции всех звеньев механизма можно условно заменить некоторой массой mпр,
сосредоточенной в произвольно выбранной точке А звена приведения (рис.23, а) или некоторым моментом инерции Jпр, приписанным звену
Рис. 23 приведения (рис.23, б).
Замена должна производится из условия равенства кинетических энергий:
Тпр=Тмех=∑Тi,
где Тпр=mпр·VA2/2 или Тпр=Jпр·ω2/2,
т.е. mпр=∑[mi·(Vi/VA)2+Ji·(ωi/VA)2] – при поступательном движении звена приведения.
Jпр=∑[ mi·(Vi/ω)2+Ji·(ωi/ω)2] – при вращательном движении звена приведения.
mпр и Jпр являются функциями положения звена приведения, т.е. их величина может меняться при изменении положения звена в процессе его движения.
|